Учеба и развитие
Комплексное оснащение образовательных учреждений















Учебный комплект автономных мобильных роботов для изучения операционных систем реального времени
Цена по запросу
С торгующими организациями и физ. лицами не работаем!
Работаем по 44-ФЗ и 223-ФЗ, прямые договора, через ЕИС, торговые площадки, региональные порталы малых закупок.
Подготавливаем техническое задание для аукционов.
Описание
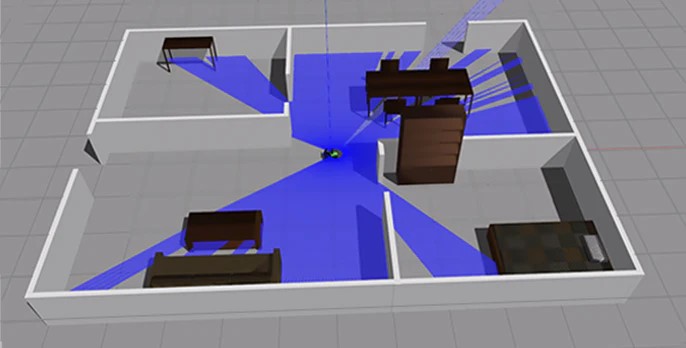
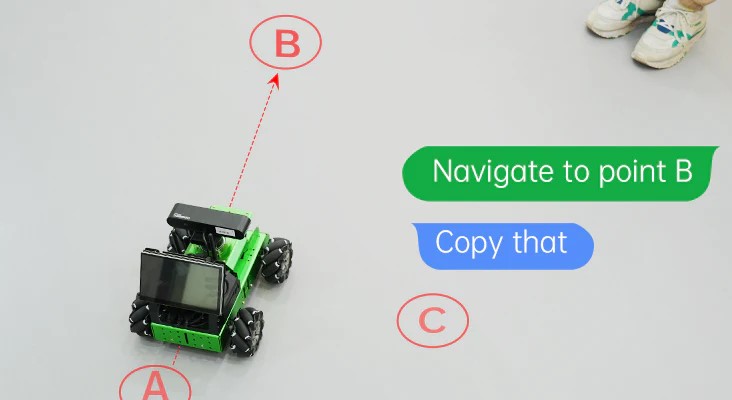
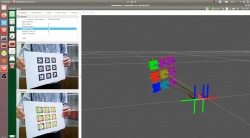
Учебный комплект автономных мобильных роботов для изучения операционных систем реального времени. Он оснащен NVIDIA Jetson Nano, высокопроизводительным моторами, лидаром, 3D-камерой глубины и 7-дюймовым экраном. Картографирование и навигация, планирование пути, отслеживание и предотвращение препятствий, автономное вождение, распознавание человеческих черт, соматосенсорное взаимодействие и голосовое взаимодействие. Автономный мобильный робот использует лидар для обнаружения окружения в режиме реального времени, обеспечивая как одноточечную, так и многоточечную навигацию. Он может перепланировать маршрут, чтобы избежать препятствия и продолжить движение. Автономный мобильный робот может обеспечить навигацию для нескольких транспортных средств, планирование пути и интеллектуальное предотвращение препятствий.
Возможности набора:
- NVIDIA Jetson Nano может запускать основные платформы глубокого обучения, такие как TensorFlow, PyTorch, Caffe/Caffe2, Keras, MXNet.
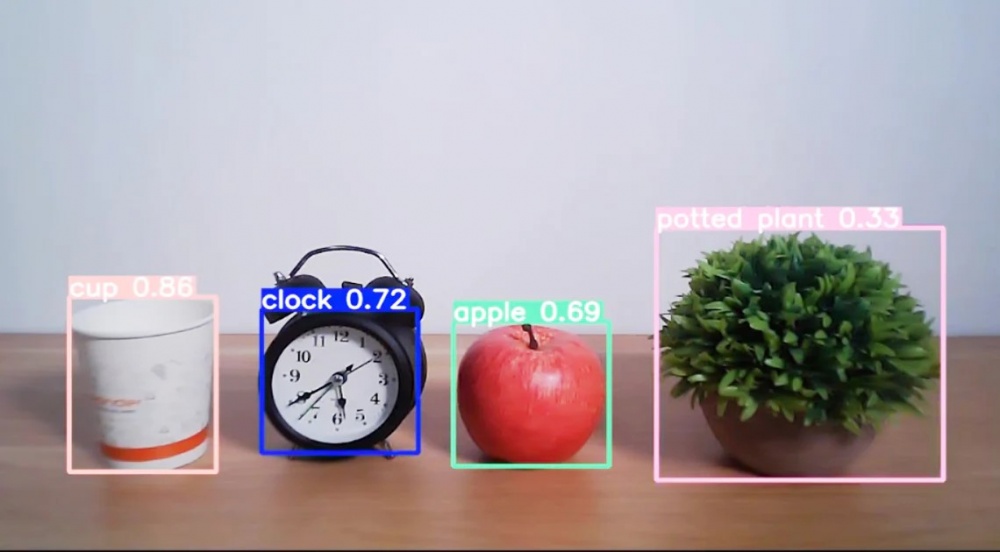
- Учебный комплект на базе Jetson Nano может реализовывать распознавание изображений, обнаружение и позиционирование объектов, оценку позы, семантическую сегментацию, интеллектуальный анализ.
- Учебный комплект оснащен высокопроизводительным лидаром, который поддерживает картографирование с использованием различных алгоритмов, включая Gmapping, Hector, Karto и Cartographer.
- Возможность реализовать планирование пути, навигацию по фиксированной точке, а также обход препятствий во время навигации.
- Возможность отслеживать препятствие в режиме реального времени во время навигации. Таким образом, он может перепланировать маршрут, чтобы избежать препятствия и продолжить движение.
- Используя алгоритм RRT, может завершить картографирование исследования, сохранить карту и самостоятельно вернуться к исходной точке, поэтому нет необходимости в ручном управлении.
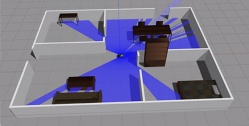
- Камера глубины поддерживает 3D-картографирование двумя способами: чистое RTAB-видение и объединение видения, а также лидар, который позволяет автономному мобильному роботу перемещаться и избегать препятствий, как на 3D-карте, так и в реальных условиях.
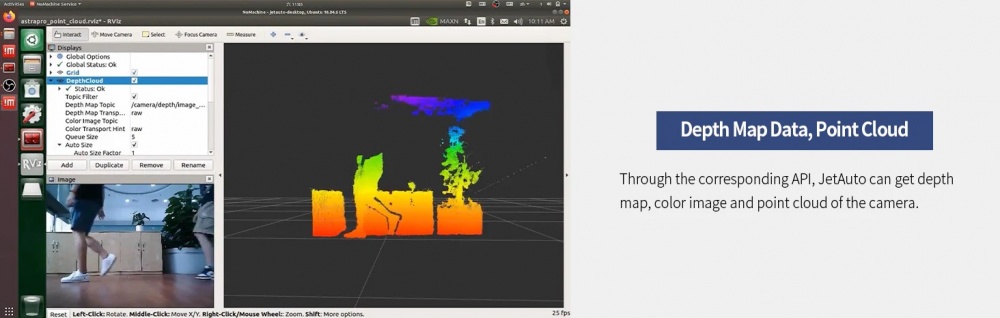
- ORB-SLAM — это платформа SLAM с открытым исходным кодом для монокулярных, бинокулярных камер и камер RGB-D, которая способна вычислять траекторию камеры в реальном времени и реконструировать трехмерное окружение. А в режиме RGB-D можно получить реальный размер объекта через соответствующий API может получить карту глубины, цветное изображение и облако точек камеры.
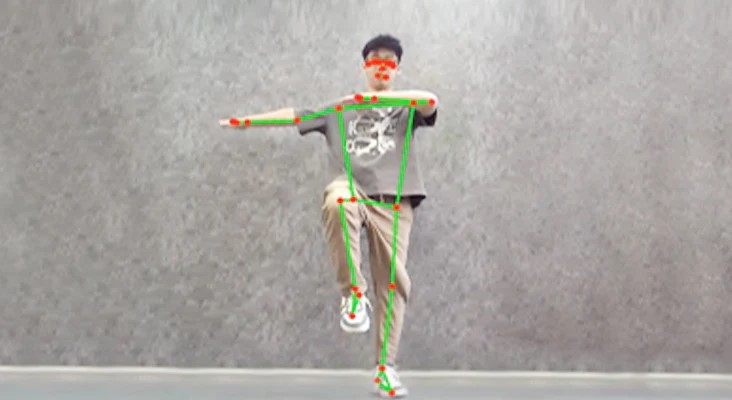
- На основе платформы MediaPipe может выполнять распознавание человеческого тела, кончиков пальцев, лиц, 3D-обнаружение и многое другое.
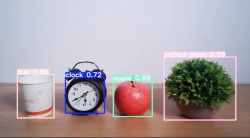
- Используйте сетевой алгоритм YOLO и библиотеку моделей глубокого обучения для распознавания объектов.
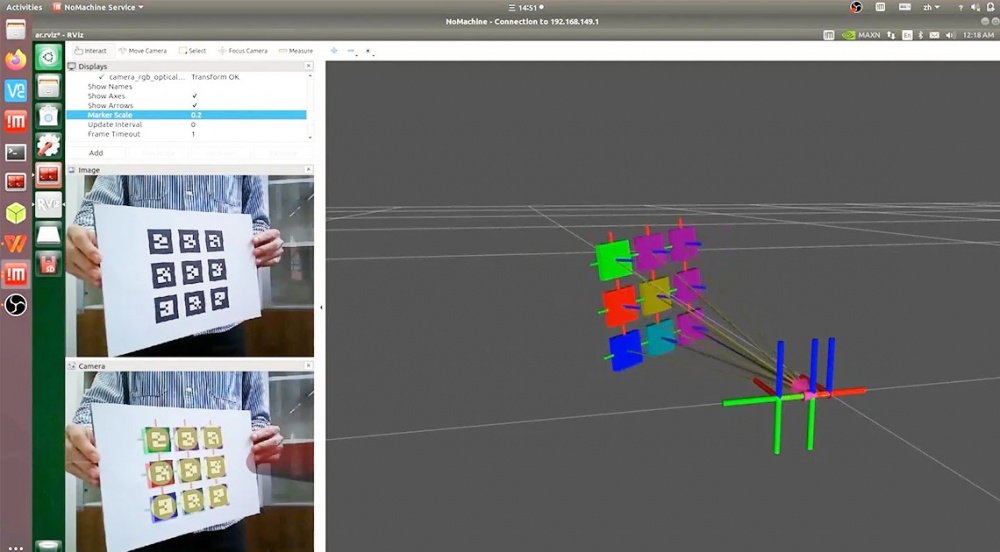
- Опираясь на алгоритм фильтрации KCF, робот может отслеживать выбранную цель, способен распознавать и отслеживать назначенный цвет, а также одновременно распознавать несколько QR кодов и их координаты.
- Возможность работать с кинематической имитационной моделью URDF.
- 6-микрофонная матрица отлично справляется с локализацией источника звука в дальней зоне, распознаванием голоса и голосовым взаимодействием. По сравнению с обычным микрофонным модулем он может реализовывать более продвинутые функции.
- Возможность связи между несколькими машинами может обеспечить навигацию для нескольких транспортных средств, планирование пути и интеллектуальное предотвращение препятствий.
Уровни обучения:
- Исследовательский уровень: Знакомство со сложной кинематикой, основы тригонометрии, углубленное изучение текстовых языков программирования, изучение физических основ работы датчиков.
- Продвинутый уровень: Изучить алгоритмы поиска пути: A*, Dijkstra, RRT, PRM, Развитие навыков планирования движения: локальное и глобальное планирование, планирование траекторий. Распознавания графических маркеров, распознавание массивов линий и элементов дорожных знаков и разметки, картография, распознавание направления источника звука. Способы использования роботов и глубокого обучения для автоматизации различных процессов. Визуализация облака точек
Состав:
| Робот в сборе | 1 шт. |
| Антенна | 2 шт. |
| Адаптер питания на 12 Вольт 5A | 1 шт. |
| LCD дисплей 7 дюмов | 1 шт. |
| Картридер | 1 шт. |
| Кронштейн для экрана | 1 шт. |
| Камера глубины | 1 шт. |
| CD карта | 1 шт. |
| Отвертка крестовая | 1 шт. |
| Метки с кодом | 3 шт. |
| Цветные кубики | 3 шт. |
| Набор метизов | 1 шт. |

Характеристики:
| основное общее образование | |
| Артикул | HW2019223 |
| Бренд | Техник |
Рекомендуем

Образовательный набор для изучения мобильных робототехнических систем с возможностью машинного обучения "Мастер ИН". Продвинутый уровень
Артикул Артикул: ЛДО.HW2019205
Цена по запросу
Учебный комплект автономных мобильных роботов для изучения операционных систем реального времени
Артикул Артикул: ЛДО.HW2019223
Цена по запросу
Универсальный комплект датчиков ко всей линейки конструкторов Техник
Артикул Артикул: ЛДО.hw99
Цена по запросу




MS0042 Набор игрушек "Научные эксперименты" (с системой хранения)
Артикул Артикул: SENSMS0042
133 290
руб.



Интерактивная панель для Патриотического воспитания в детском саду «Родина моя»
Артикул Артикул: almaА298
305 000
руб.


MS0061 Набор игрушек "Математические лабиринты" (с системой хранения)
Артикул Артикул: SENSMS0061
149 860
руб.


Природные богатства России с РобоМышью (с системой хранения)
Артикул Артикул: SENSMS0102
124 480
руб.



Природные богатства России с РобоМышью (без системы хранения)
Артикул Артикул: SENSMS0102
79 120
руб.

«Стендум - Математика» - набор информационно-методических панелей (16 шт.)
Артикул Артикул: almaА263
95 000
руб.

Комплект для познавательно-речевого развития "Соединяй и учись" (для ясельной группы)
Артикул Артикул: SENSMS0011
44 440
руб.


МИК «АЛМИК Патриот» - Методический интерактивный комплекс для изучения патриотизма в ДОУ
Артикул Артикул: almaА413
375 000
руб.
Учебно-методическое пособие «Развитие речи дошкольников в стране Наурандии»
Артикул Артикул: НР.82249
1 900
руб.

Конструктор Лёва. Кирпичики для творческих занятий 45019 старт
Артикул Артикул: ЛДО.45019
Цена по запросу


МИК «АЛМА Финансовый гений» - Методический интерактивный комплекс
Артикул Артикул: almaА22
325 000
руб.


Методический интерактивный комплекс «АЛМА Финансовая грамотность» для детей
Артикул Артикул: almaА24
415 000
руб.

Академия математики с соединяющимися кубиками в детском саду (комплект для группы)
Артикул Артикул: SENSMS0063
89 700
руб.


Комплект оборудования для универсального кабинета Логопеда и Психолога 20 м²
Артикул Артикул: almaА285
1 250 000
руб.
Товар «Учебный комплект автономных мобильных роботов для изучения операционных систем реального времени» добавлен в корзину